Advent of Code 2024 Day 14 – Restroom Redoubt
- 11 minsDay 14: Restroom Redoubt
Part 1
For today’s puzzle, there’s a room with robots, and we need to predict their movement in the future. Fortunately, our input lists all the robots, with their starting position and their velocity. After every second, they will move according to their velocity. Whenever a robot meets an edge of the room, they can teleport to the opposite edge, wrapping around the room. Also, multiple robots can occupy the same position at the same time, without any issues.
Looking at a room 11 tiles wide and 7 tiles tall, and one robot with the following characteristics p=2,4 v=2,-3:
Initial state:
...........
...........
...........
...........
..1........
...........
...........
After 1 second:
...........
....1......
...........
...........
...........
...........
...........
After 2 seconds:
...........
...........
...........
...........
...........
......1....
...........
After 3 seconds:
...........
...........
........1..
...........
...........
...........
...........
After 4 seconds:
...........
...........
...........
...........
...........
...........
..........1
After 5 seconds:
...........
...........
...........
.1.........
...........
...........
...........
Given this sample input:
p=0,4 v=3,-3
p=6,3 v=-1,-3
p=10,3 v=-1,2
p=2,0 v=2,-1
p=0,0 v=1,3
p=3,0 v=-2,-2
p=7,6 v=-1,-3
p=3,0 v=-1,-2
p=9,3 v=2,3
p=7,3 v=-1,2
p=2,4 v=2,-3
p=9,5 v=-3,-3
After 100 seconds, the room looks like this:
......2..1.
...........
1..........
.11........
.....1.....
...12......
.1....1....
We need to count all the robots in each quadrant of the room and multiply them to find the safety factor of the room. Robots that are exactly in the middle (horizontal or vertical) are not counted, so the robots to check are.
..... 2..1.
..... .....
1.... .....
..... .....
...12 .....
.1... 1....
The quadrants have 1, 3, 1 and 4 robots, so the safety factor for this room is 12.
Our task is to find the safety factor of a room that is 101 tiles wide and 101 tiles tall after 100 seconds.
My Solution
Let’s start with some pseudocode to solve this problem:
- Parse the input to get the robots’ positions and velocities.
- Initialize an empty grid to represent the room.
- Put the robots in their initial positions on the grid.
- For each second, move the robots according to their velocities.
- Count the robots in each quadrant of the room.
- Multiply the counts to get the safety factor.
Parsing the input:
def parse_robot(line: List[str]):
position = list(map(int, line[0][2:].split(",")))
velocity = tuple(map(int, line[1][2:].split(",")))
return [position, velocity]
with open("input.txt", "r") as f:
robots = [parse_robot(line.strip().split()) for line in f]
This function will parse every input line and return a list with the robot’s beginning position and velocity.
Initializing the grid:
rows = 103
cols = 101
room = [[0 for _ in range(cols)] for _ in range(rows)]
Putting the robots in their initial positions:
def initialize_robot(room, robot):
x, y = robot[0]
room[y][x] += 1
Moving a robot according to its velocity:
def move_robot(robot, room, rows, cols):
v_x, v_y = robot[1]
p_x, p_y = robot[0]
new_x = (p_x + v_x) % cols
new_y = (p_y + v_y) % rows
room[p_y][p_x] -= 1
room[new_y][new_x] += 1
robot[0] = [new_x, new_y]
I set the new position of the robot to be the current position plus the velocity and then modulo the width and height of the room to wrap around the edges. Once the robot is moved, I update the room grid accordingly.
I made a helper function to get each quadrant of the room:
def get_quadrant(room, quadrant):
rows, cols = len(room), len(room[0])
match quadrant:
case quadrant.TOP_LEFT:
return [[room[y][x] for x in range(cols // 2)] for y in range(rows // 2)]
case quadrant.TOP_RIGHT:
return [
[room[y][x] for x in range(cols // 2 + 1, cols)]
for y in range(rows // 2)
]
case quadrant.BOTTOM_LEFT:
return [
[room[y][x] for x in range(cols // 2)]
for y in range(rows // 2 + 1, rows)
]
case quadrant.BOTTOM_RIGHT:
return [
[room[y][x] for x in range(cols // 2 + 1, cols)]
for y in range(rows // 2 + 1, rows)
]
I then counted the robots in each quadrant:
safety_factor = 1
for quadrant in Quadrants:
room_quadrant = get_quadrant(room, quadrant)
num_robots = sum(sum(row) for row in room_quadrant)
safety_factor *= num_robots
Finally, I put everything together in a loop to simulate the robots’ movement after 100 seconds:
def main1():
with open("input.txt", "r") as f:
robots = [parse_robot(line.strip().split()) for line in f]
rows = 103
cols = 101
room = [[0 for _ in range(cols)] for _ in range(rows)]
for robot in robots:
initialize_robot(room, robot)
for _ in range(100):
move_robot(robot, room, rows, cols)
safety_factor = 1
for quadrant in Quadrants:
room_quadrant = get_quadrant(room, quadrant)
num_robots = sum(sum(row) for row in room_quadrant)
safety_factor *= num_robots
print(f"LOGF: { safety_factor = }")
As always, I’ve only included the relevant parts of the code here, but to see my full solution, you can check out my Advent of Code GitHub repository.
Part 2
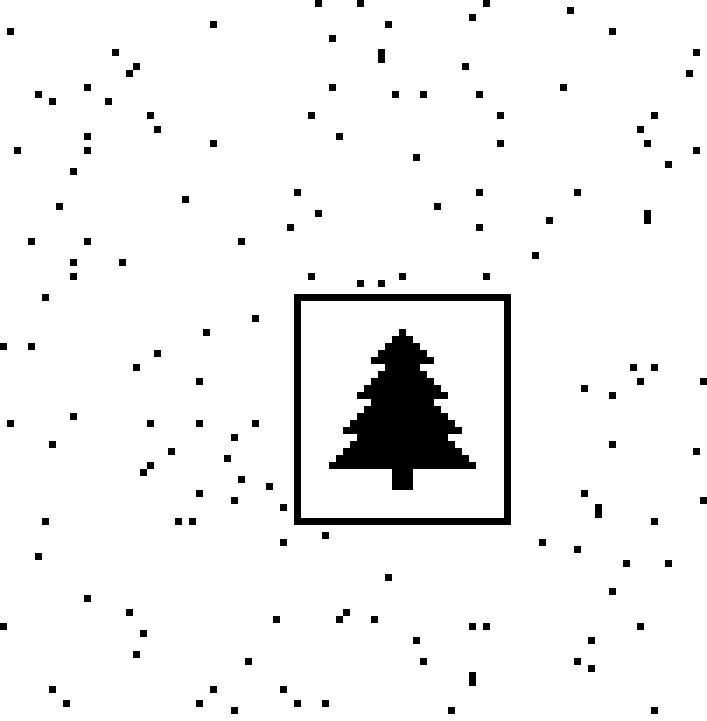
For part 2, we learn that at some point in the future, the robots will form a Christmas tree shape. We need to find the earliest time this will happen.
My Solution
Given that we don’t know how many seconds it will take for the robots to form a Christmas tree shape I needed to pick an upper bound to iterate until. I submitted 10000 as the answer first on the website, where it was too high, so I know my answer appears before 10000 seconds.
I checked the room after every second by saving the room as a bitmap, that I could quickly look over to find the Christmas tree. I wrote a helper function to save the room as a bitmap:
def print_bitmap(room, rows, cols, filename):
with open(filename, "w") as f:
f.write(f"P1\n{cols} {rows}\n")
for row in range(rows):
for col in range(cols):
f.write(str(room[row][col]))
f.write("\n")
This function will write the room to a file in the PBM format, which just has black and white cells.
Running the simulation:
def main2():
with open("input.txt", "r") as f:
robots = [parse_robot(line.strip().split()) for line in f]
rows = 103
cols = 101
room = [[0 for _ in range(cols)] for _ in range(rows)]
for robot in robots:
initialize_robot(room, robot)
for i in range(10000):
for robot in robots:
move_robot(robot, room, rows, cols)
print_bitmap(room, rows, cols, f"pics/output_{i+1}.pbm")
Even though this approach isn’t programmatically checking for the Christmas tree, it only took me a minute to find the correct bitmap because I was able to look over about 50 pictures at a time. I then checked the time outputted in the filename to find the earliest time the robots formed the tree. Here’s the tree bitmap in all its glory:


Today’s puzzle was a fun one, and I enjoyed the visual aspect of it. The creator must have had a lot of fun designing this puzzle and generating inputs. I’m looking forward to the next one!
Again, I’ve only included the relevant parts of the code here, check out my repository for the full solution.
That’s it for day 14 of Advent of Code 2024! I hope you enjoyed reading my solution and let’s see how the rest of the month goes!

Vinesh Benny
A Software Engineer learning about different things in life and otherwise